Кошик
BLUE PRINT ADG03809 купить в Киеве, Украина
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BLUE PRINTADG03809 |  |
Трос, управління зчепленням
Вага, кг]: 0,3
Необхідна кількість: 1 |
Уточнити наявність | |||||||||
Аналоги для BLUE PRINT ADG03809 | ||||||||||||
| A.B.S.K25090 |  |
Трос, управління зчепленням
Вага, кг]: 0,22
|
| |||||||||
| LPRC0283C | LPR C0283C |
Трос, управління зчепленням
Для артикула №: C0283C
Довжина 1/довжина 2 [мм]: 845/540 |
Уточнити наявність | |||||||||
| TEXTAR58014600 | 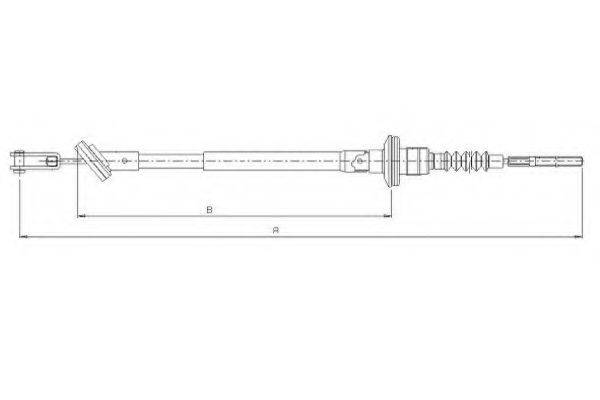 |
Трос, управління зчепленням
Довжина 1/довжина 2 [мм]: 845/550
Номер технічної інформації: 58000 0146 0 1 |
Уточнити наявність | |||||||||
| FTEFKS17020 | 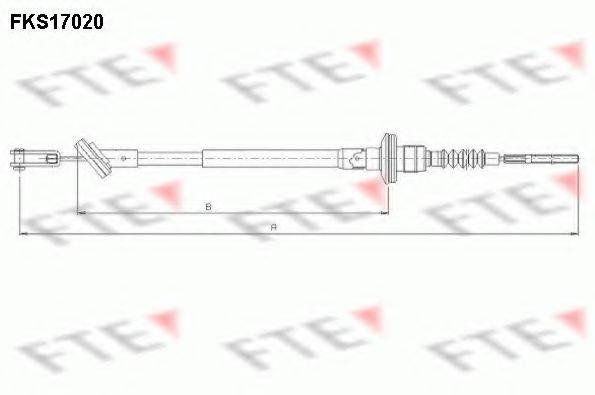 |
Трос, управління зчепленням
Автомобіль з ліво-/правостороннім розташуванням керма: для лівостороннього розташування керма
Довжина 1/довжина 2 [мм]: 851/576 |
Уточнити наявність | |||||||||
| HERTH+BUSS JAKOPARTSJ2300900 |  |
Трос, управління зчепленням
Довжина [мм]: 850
|
Уточнити наявність | |||||||||
| MAGNETI MARELLI600000054830 |  |
Трос, управління зчепленням | Уточнити наявність | |||||||||
| TRWGCC3151 |  |
Трос, управління зчепленням
Довжина 1/довжина 2 [мм]: 845/540
|
Уточнити наявність | |||||||||
| NIPPARTSJ25090 |  |
Трос, управління зчепленням
Автомобіль з ліво-/правостороннім розташуванням керма: для лівостороннього розташування керма
Довжина кабелю [мм]: 851 |
Уточнити наявність | |||||||||
| MASTER-SPORT24372829002-PCS-MS |  |
Трос, управління зчепленням
Довжина [мм]: 851
|
Уточнити наявність | |||||||||
| CABOR18.3500 | 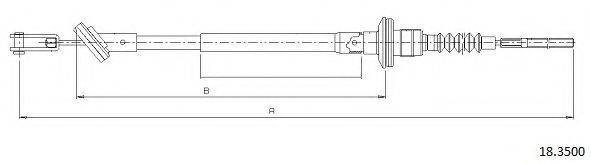 |
Трос, управління зчепленням
Довжина 1 [мм]: 576
Довжина кабелю [мм]: 851 |
Уточнити наявність | |||||||||
| CHEVROLET96315242 | CHEVROLET 96315242 |
Трос, управління зчепленням
Вага, кг]: 0,3
Необхідна кількість: 1 |
Уточнити наявність | |||||||||
| DAEWOO96315242 | DAEWOO 96315242 |
Трос, управління зчепленням
Вага, кг]: 0,3
Необхідна кількість: 1 |
Уточнити наявність | |||||||||